[Project] LLM-Driven Robotic Control Suite

September 2024 - December 2025
Affiliation: Research Mentor/Advisor, SnT — University of Luxembourg
Target Audience: Robotics Research Communities
Project Ecosystem: GitHub | Paper
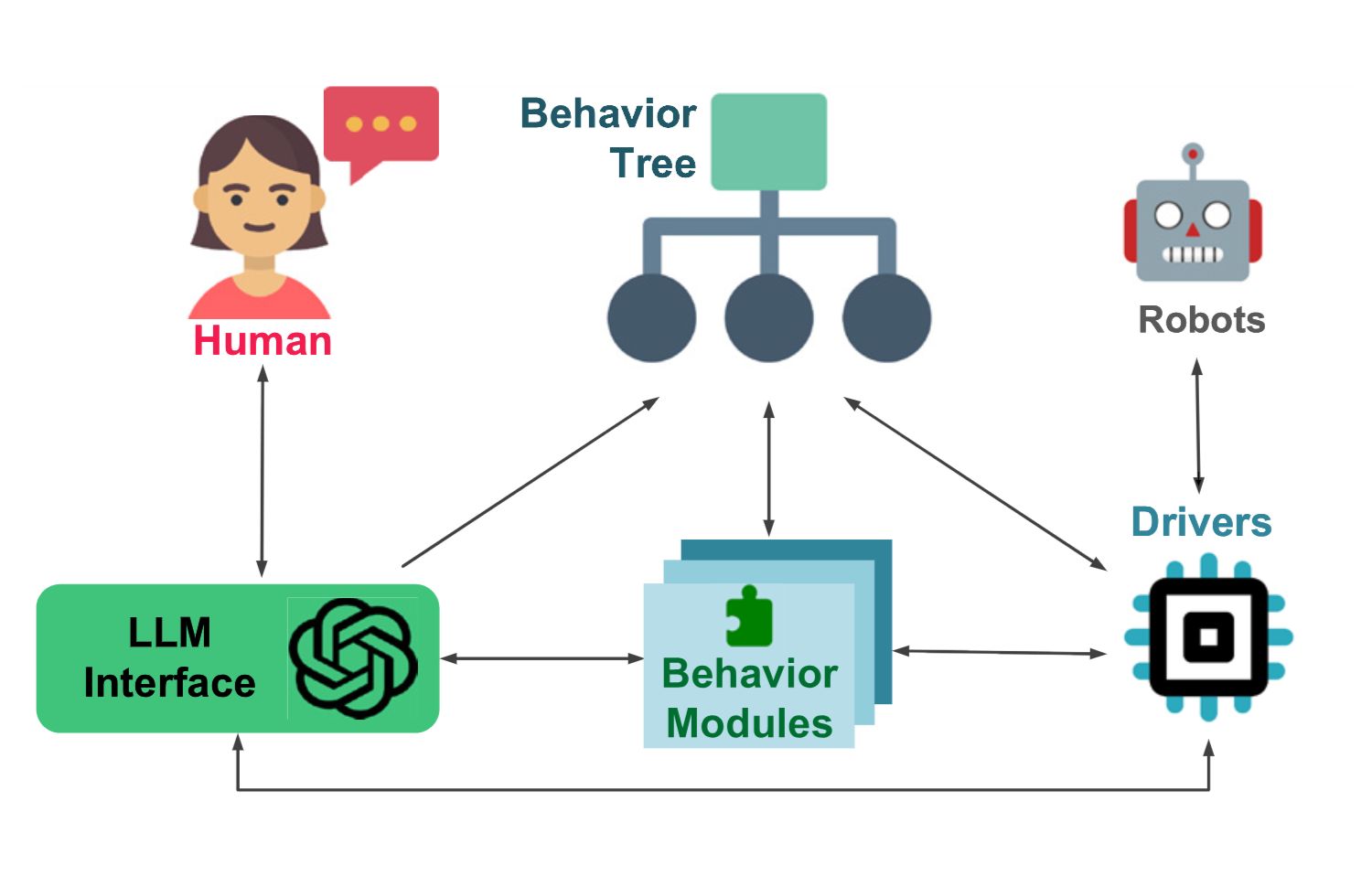
- Natural Language Task Planning: uses LLMs to parse spontaneous human instructions, decoupling users from pre-defined terminal commands or complex manual controls.
- Deterministic Execution Mapping: translates probabilistic LLM outputs into reliable, and execution sequences by dynamically generating and updating reactive Behavior Trees.
- High Cognition-to-Execution Precision: shows a high-fidelity average semantic accuracy across dynamic, real-world edge cases.
- 💡 Stack: ROS2, Python, C++, GenAI, Behavior Trees
I.M. Chekam, I. Pastor-Martinez, A. Tourani, J.A. Millan-Romera, L. Ribeiro, P.M. Bastos
Soares, H. Voos, and J.L. Sanchez-Lopez,
"Interpretable Robot Control via Structured Behavior Trees and Large Language Models,"
IEEE Access,
vol. 13, pp. 200905-200916, 2025.
DOI: 10.1109/ACCESS.2025.3635471
DOI: 10.1109/ACCESS.2025.3635471