[Project] vS-Graphs: Coupling Visual SLAM and 3D Scene Graphs

January 2023 - March 2026
Affiliation: Ph.D. Core Research Project, University of Luxembourg
Target Audience: Robotics Research Communities
Project Ecosystem: Web-page | GitHub | Video | Paper (IEEE RAL) | Paper (ICRA-W) | Paper (ICUAS) | Paper (Robotics) | Paper (IROS)
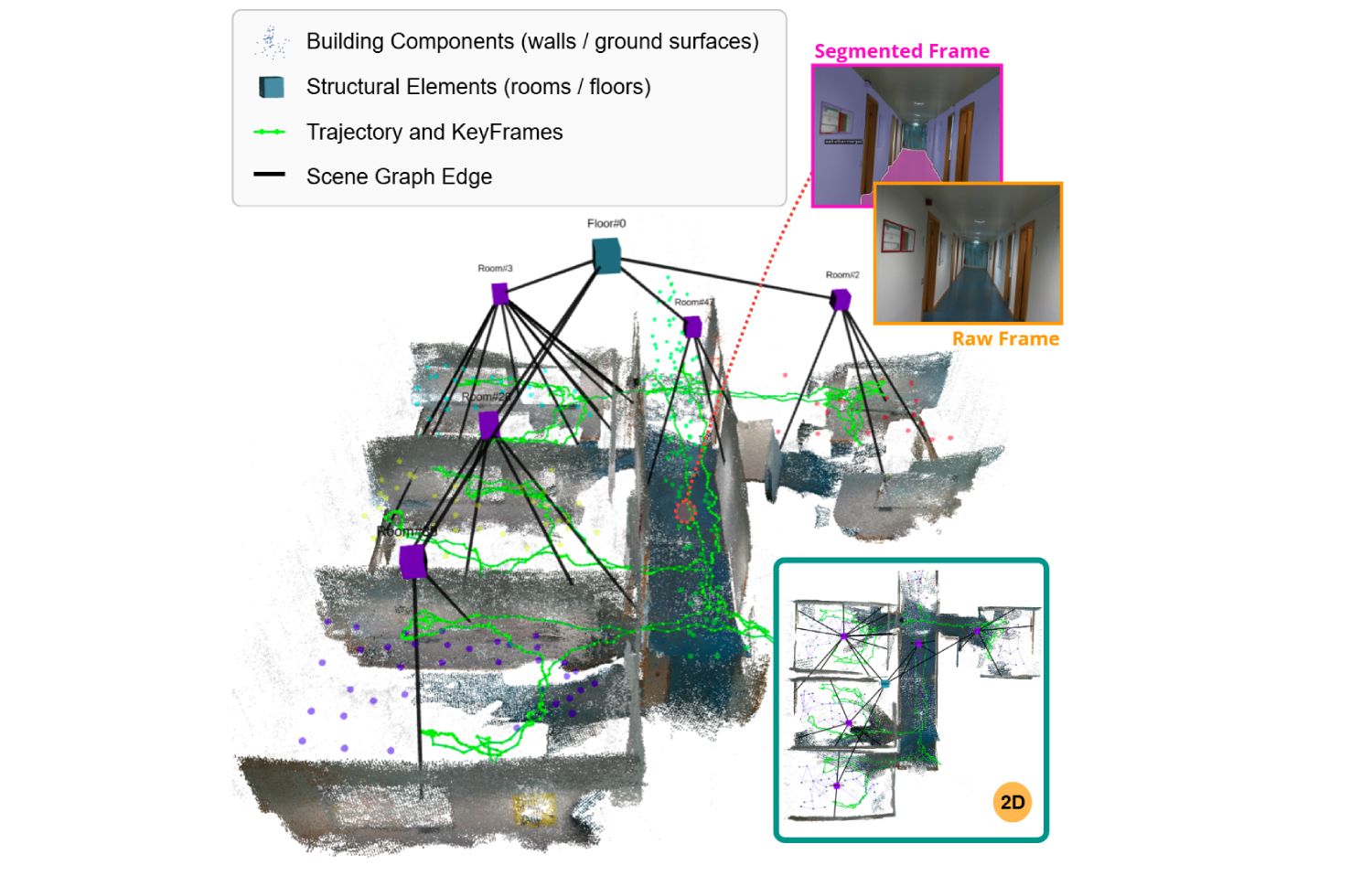
- Real-Time Visual SLAM with Optimizable 3D Scene Graphs: groundbreaking, real-time Visual SLAM framework that bridges the gap between raw spatial mapping and human-readable map comprehension.
- Hierarchical Structural Inference: translates low-level building components into broader spatial entities like rooms and distinct floor layouts, creating an organized semantic hierarchy.
- Optimizable 3D Scene Representation: embeds environmental logic into a unified, optimizable graph structure, continuously refining both topological associations and absolute spatial metrics in real time.
- 💡 Stack: Python, C++, OpenCV, ROS
A. Tourani, M. Fernandez-Cortizas, S. Ejaz, D. Perez-Saura, A. Bikandi-Noya, J.L.
Sanchez-Lopez, and H. Voos,
"Passage-Aware Structural Mapping for RGB-D Visual SLAM,"
IEEE International Conference on Robotics & Automation (ICRA'26) - Robots Meet Prior Maps
Workshop,
Vienna, Austria, 2026.
DOI: 10.48550/arXiv.2604.24707
DOI: 10.48550/arXiv.2604.24707
A. Tourani, S. Ejaz, H. Bavle, M. Fernandez-Cortizas, D. Morilla-Cabello, J.L.
Sanchez-Lopez, and H. Voos,
"vS-Graphs: Tightly Coupling Visual SLAM and 3D Scene Graphs Exploiting Hierarchical Scene
Understanding,"
IEEE Robotics and Automation Letters (IEEE RA-L),
vol. 11, no. 8, pp. 9239-9246, 2026.
DOI: 10.1109/LRA.2026.3703649
DOI: 10.1109/LRA.2026.3703649
A. Tourani, S. Ejaz, H. Bavle, H. Voos, J.L. Sanchez-Lopez, and H. Voos,
"Towards Localizing Structural Elements: Merging Geometrical Detection with Semantic Verification
in RGB-D Data,"
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'24) - 14th Workshop
on Planning, Perception and Navigation for Intelligent Vehicles,
2024.
(Link: PDF)
A. Radwan, A. Tourani, H. Bavle, H. Voos, and J. L. Sanchez-Lopez,
"UAV-assisted Visual SLAM Generating Reconstructed 3D Scene Graphs in GPS-denied Environments,"
International Conference on Unmanned Aircraft Systems (ICUAS),
pp. 1109-1116, Chania - Crete, Greece, 2024.
DOI: 10.1109/ICUAS60882.2024.10556948
DOI: 10.1109/ICUAS60882.2024.10556948
A. Tourani, H. Bavle, D.I. Avşar, J.L. Sanchez-Lopez, R. Munoz-Salinas, and H. Voos,
"Vision-Based Situational Graphs Exploiting Fiducial Markers for the Integration of Semantic
Entities,"
Robotics, vol. 13, no. 7, 2024.
DOI: 10.3390/robotics13070106
DOI: 10.3390/robotics13070106
A. Tourani, H. Bavle, J. L. Sanchez-Lopez, R. Munoz-Salinas, and H. Voos,
"Marker-based Visual SLAM leveraging Hierarchical Representations,"
Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS),,
pp. 3461-3467, Detroit, MI, USA, 2023.
DOI: 10.1109/IROS55552.2023.10341891
DOI: 10.1109/IROS55552.2023.10341891