
iMarkers for Advanced Robotics



Curious to know more? Read this article or watch this video:
Check the code using the buttons below:
Project Card
- Category: Robotics
- Date: Since April 2022
- Affiliation: Doctoral Researcher, SnT, University of Luxembourg, Luxembourg
- Stack: C++, Python, ROS, OpenCV
- Web-page: https://snt-arg.github.io/iMarkers/
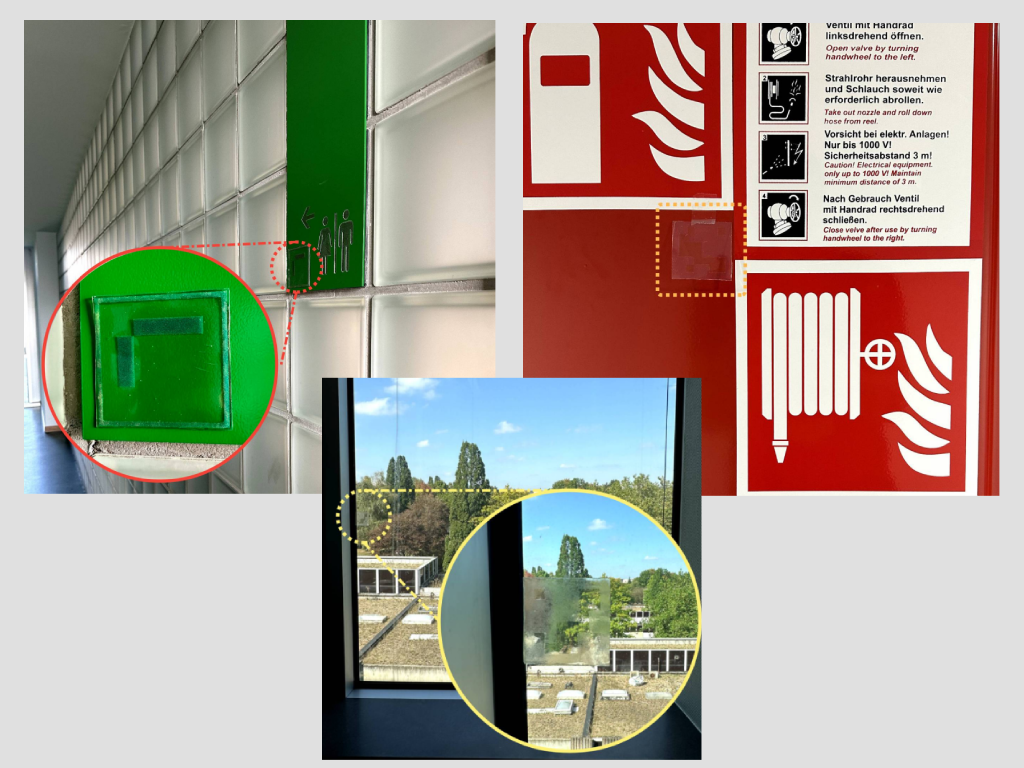
A new generation of fiducial markers for robotics and Augmented Reality (AR) applications that are invisible or barely-visible to humans but visible for robots, as part of an interdisciplinary project with the Physics and Material Science Group at the University of Luxembourg. The results are published in the papers referenced below:
A. Tourani, D.I. Avşar, H. Bavle, J.L. Sanchez-Lopez, J. P.F. Lagerwall, and H. Voos, "Unveiling the Potential of iMarkers: Invisible Fiducial Markers for Advanced Robotics," IEEE Robotics & Automation Magazine (RAM), [under review], 2025, DOI: 10.48550/arXiv.2501.15505.
A. Tourani, H. Bavle, D.I. Avşar, J.L. Sanchez-Lopez, R. Munoz-Salinas, and H. Voos, "Vision-Based Situational Graphs Exploiting Fiducial Markers for the Integration of Semantic Entities," Robotics, vol. 13, no. 7, 2024, DOI: 10.1038/s41377-022-01002-4.
A. Tourani, H. Bavle, J.L. Sanchez-Lopez, R. Munoz-Salinas, and H. Voos, "Marker-based Visual SLAM leveraging Hierarchical Representations," Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'23), pp. 3461-3467, Detroit, MI, USA, 2023, DOI: 10.1109/IROS55552.2023.10341891.
H. Agha, Y. Geng, X. Ma, D.I. Avşar, R. Kizhakidathazhath, Y.S. Zhang, A. Tourani, H. Bavle, J.L. Sanchez-Lopez, H. Voos, M. Schwartz, and J. P.F. Lagerwall, "Unclonable Human-invisible Machine Vision Markers Leveraging the Omnidirectional Chiral Bragg Diffraction of Cholesteric Spherical Reflectors," Light: Science & Applications (Nature Publications), vol. 11, no. 309, 2022, DOI: 10.1038/s41377-022-01002-4.