
vS-Graphs: 3D Scene Graphs Combined with Visual SLAM

Project Card
A real-time Visual SLAM framework that combines 3D scene graphs of the environments in which the robot is operating with localization and map reconstruction. The project is the primary focus of my doctoral research at SnT, the University of Luxembourg. It has been matured through several iterations, presented in various conferences and journals, listed below:
A. Tourani, S. Ejaz, H. Bavle, H. Voos, J.L. Sanchez-Lopez, and H. Voos, "Towards Localizing Structural Elements: Merging Geometrical Detection with Semantic Verification in RGB-D Data," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'24) - 14th Workshop on Planning, Perception and Navigation for Intelligent Vehicles, 2024. [link]
A. Radwan, A. Tourani, H. Bavle, H. Voos, and J. L. Sanchez-Lopez, "UAV-assisted Visual SLAM Generating Reconstructed 3D Scene Graphs in GPS-denied Environments," International Conference on Unmanned Aircraft Systems, Chania - Crete, Greece, 2024, pp. 1109-1116, DOI: 10.1109/ICUAS60882.2024.10556948.
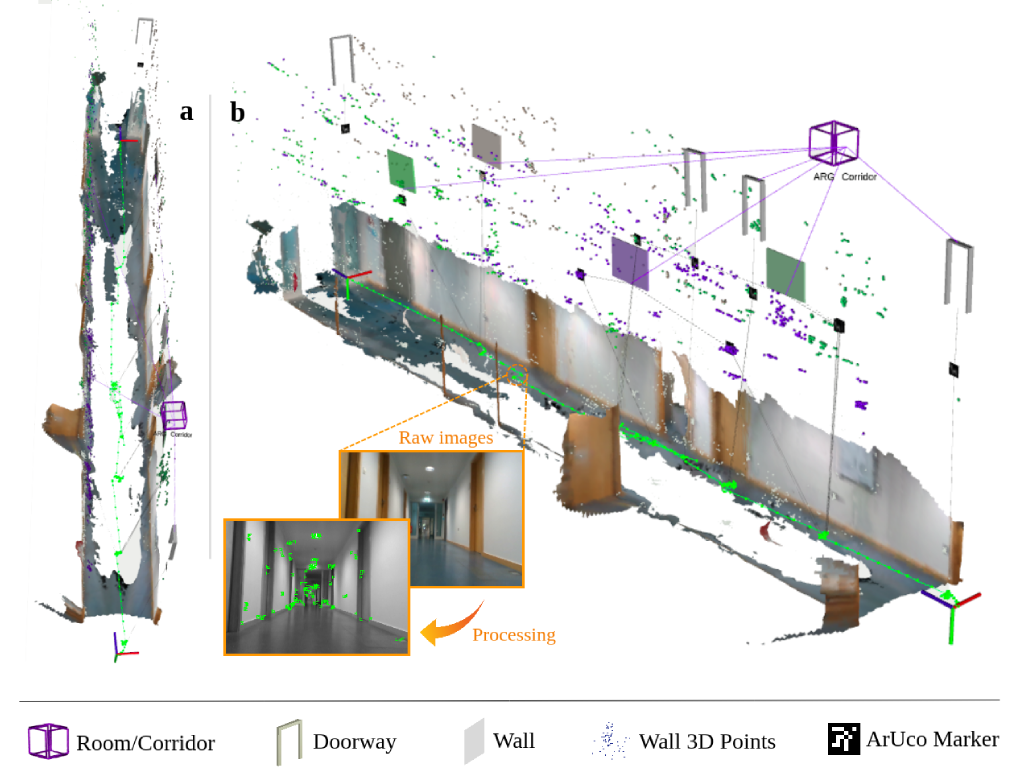
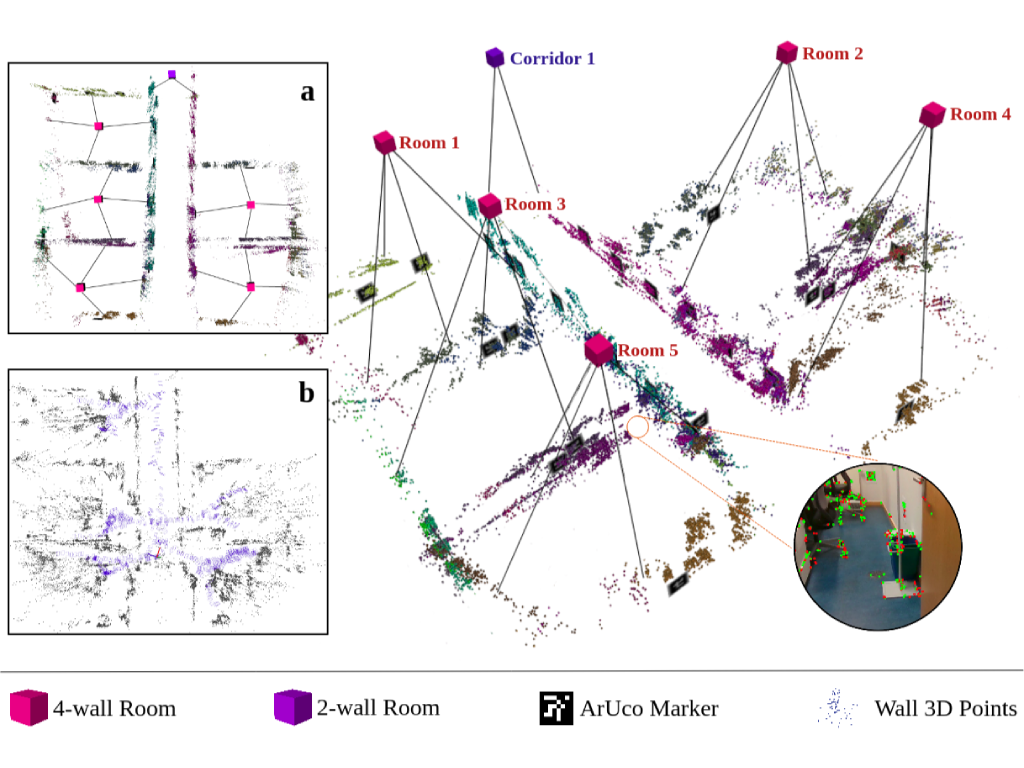
A. Tourani, H. Bavle, J. L. Sanchez-Lopez, D. Avşar, R. Munoz-Salinas, and H. Voos, "Vision-Based Situational Graphs Exploiting Fiducial Markers for the Integration of Semantic Entities," Robotics, vol. 13, no. 7, p. 106, 2024, DOI: 10.3390/robotics13070106.
A. Tourani, H. Bavle, J. L. Sanchez-Lopez, R. Munoz-Salinas, and H. Voos, "Marker-based Visual SLAM leveraging Hierarchical Representations," Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, DOI: 10.1109/IROS55552.2023.10341891.